-
სამრეწველო რობოტების ძირითადი შემადგენლობა
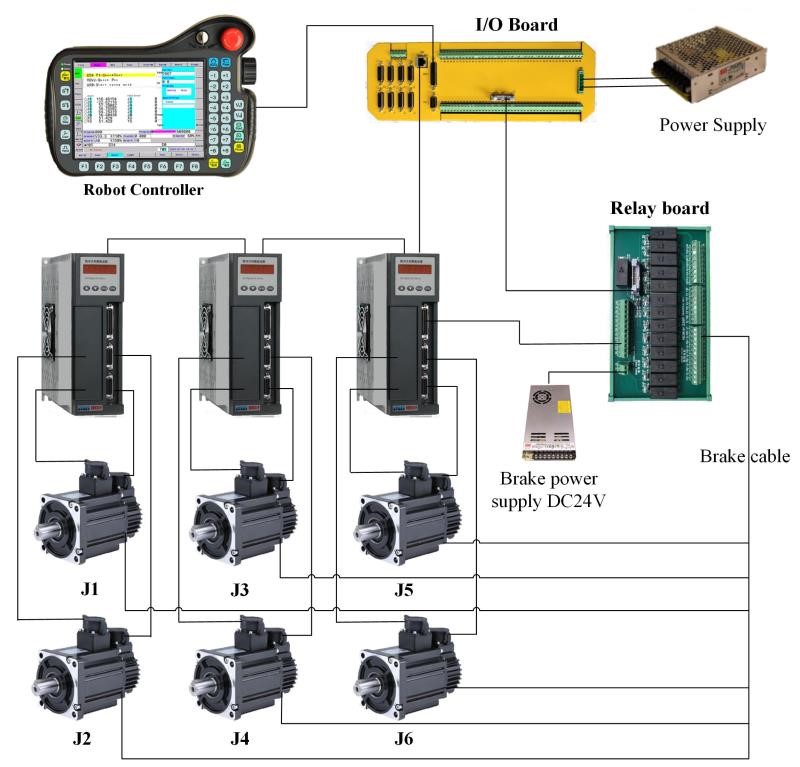
არქიტექტურის თვალსაზრისით, რობოტი შეიძლება დაიყოს სამ ნაწილად და ექვს სისტემად, რომელთაგან სამი ნაწილია: მექანიკური ნაწილი (გამოიყენება სხვადასხვა მოქმედებების განსახორციელებლად), სენსორული ნაწილი (გამოიყენება შიდა და გარე ინფორმაციის აღქმისთვის), საკონტროლო ნაწილი (რობოტის კონტროლი სხვადასხვა მოქმედებების დასასრულებლად ...დაწვრილებით -
CNC დამუშავების ცენტრის პროგრამირების უნარების სტრატეგია
CNC დამუშავებისთვის ძალიან მნიშვნელოვანია პროგრამირება, რაც პირდაპირ გავლენას ახდენს დამუშავების ხარისხსა და ეფექტურობაზე. ასე რომ, როგორ სწრაფად დაეუფლონ CNC დამუშავების ცენტრების პროგრამირების უნარებს? ვისწავლოთ ერთად! პაუზის ბრძანება, G04X(U)_/P_ ეხება ხელსაწყოს პაუზის დროს (მიწოდების გაჩერება, ღერძი ...დაწვრილებით -

CNC ჩარხების განვითარების ტენდენციის შვიდი ტექნიკური მინიშნება ჩინეთში.
ასპექტი 1: რთული ჩარხები აღმავალშია. მაღალი დონის CNC ჩარხების მძლავრი კონტროლის უნარის წყალობით, სულ უფრო დახვეწილი დიზაინისა და წარმოების ტექნოლოგიისა და მზარდი აპლიკაციის ტექნოლოგიის წყალობით, მათ შორის პროგრამირების, რთული ჩარხები, მათი სიმძლავრით...დაწვრილებით






