



6-Axis Education ან არტიკულირებული Robot Arm Diy Delta ან Camera Robot Arm
სპეციფიკაცია
ღერძი:6
მაქსიმალური დატვირთვა: 4 კგ
განმეორებითი მდებარეობა:±0.01მმ
გამოყენების ტენიანობა: 20-80%
სალბის გარემო:0℃-45℃
მონტაჟი: გრუნტი
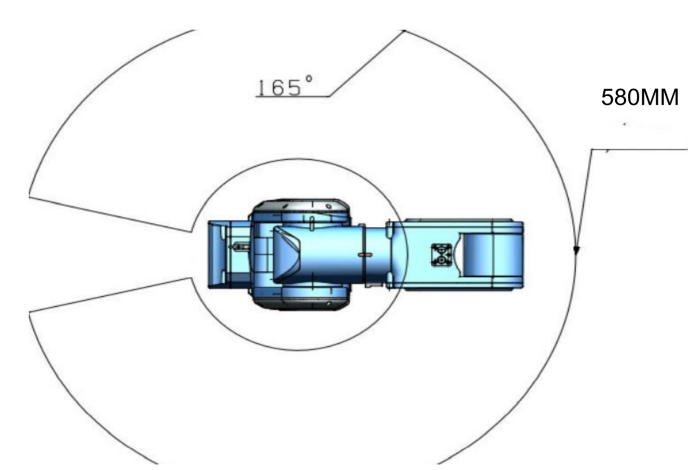
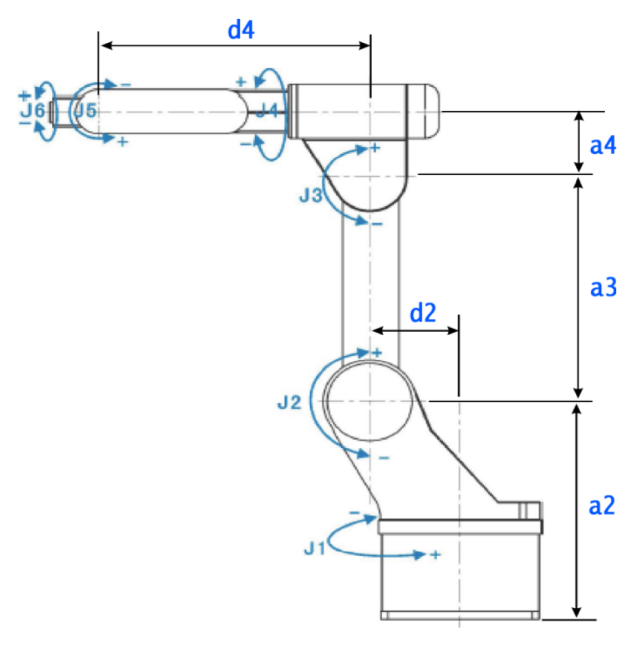
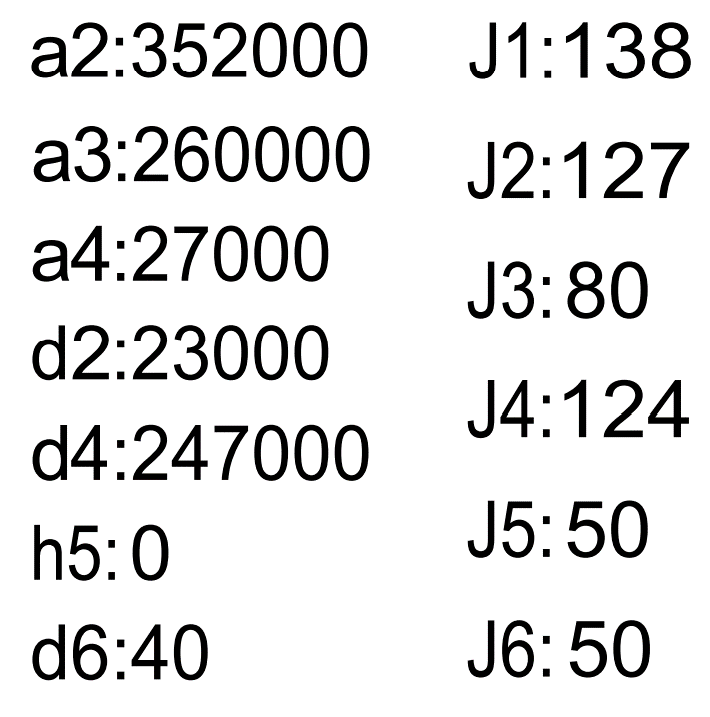
სამუშაო დიაპაზონი: J1:±165°
J2:-100°~+120°
J3:+150° ~ -60°
J4:±175°
J5:+130° ~ -30°
J6:±180°
მაქსიმალური სიჩქარე: J1:260°/წმ
J2: 250°/წმ
J3: 250°/წმ
J4: 250°/წმ
J5: 200°/წმ
J6: 760°/წმ
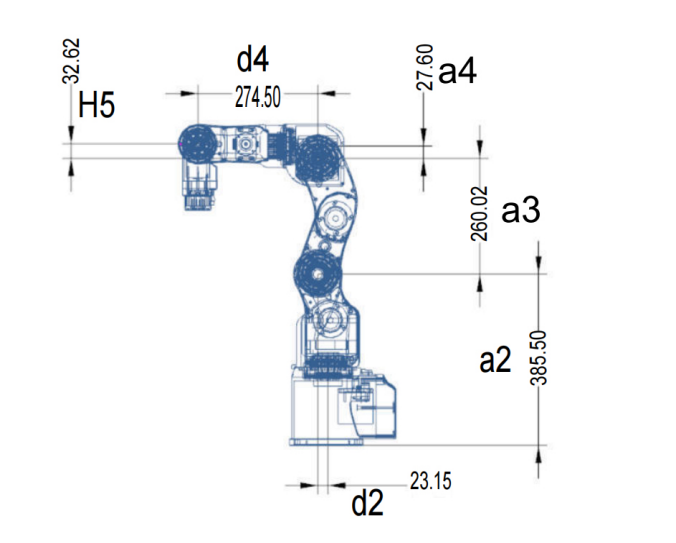
სამუშაო დიაპაზონი:
ბაზის მონტაჟი:
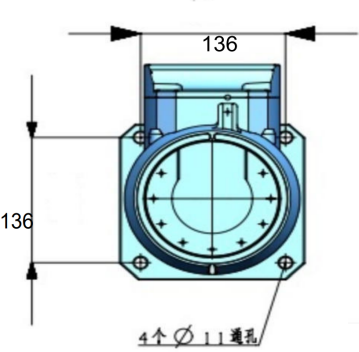
ბაზის მონტაჟი:
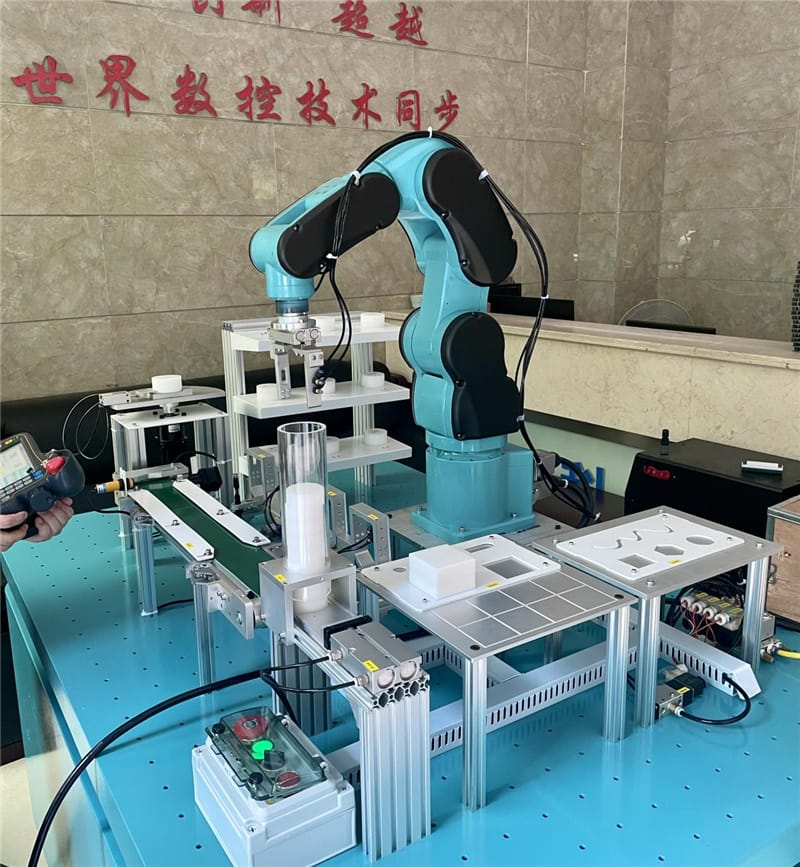
აპლიკაციები
საგანმანათლებლო პროგრამები:
1. რობოტის სისტემის ძირითადი შემადგენლობის შესწავლა.
2. რობოტის ასწავლის გულსაკიდის პროგრამირების და სასწავლო ფუნქციების შესწავლა.
3. რობოტის ოფლაინ პროგრამირების საბაზისო ცოდნის შესწავლა.
4. რობოტი io-ს მუშაობის და აპლიკაციის პროგრამირების შესწავლა.
5. რობოტის ვიზუალური აპლიკაციების შესწავლა
კომერციული სცენები: რობოტი ნაყინი Robot Bartender Robot ყავა რობოტი რძე ჩაი მსუბუქი ინდუსტრიის სცენები: Measuring Dispensing Inspection დახარისხება
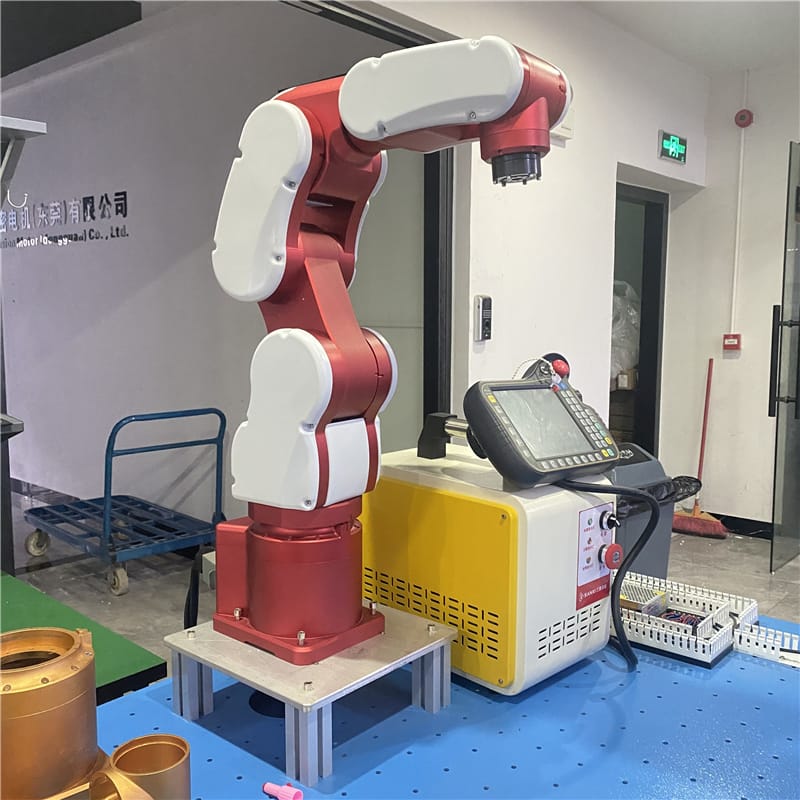
პროდუქტის მახასიათებლები
რობოტული მკლავი: რობოტული მკლავი დამზადებულია ალუმინის ჩამოსხმისგან CNC დამუშავების ცენტრის მეშვეობით, ხოლო ზედაპირი შეფუთულია პლასტმასით და აქვს ლამაზი გარეგნობა.
დაჯავშნილი საკაბელო ხვრელი: რობოტის მკლავს აქვს დაცული საკაბელო ხვრელები, რომლებიც ლამაზია და არ აფერხებს მანიპულატორის მუშაობას. ტრაქეის ბოლო დაცულია პორტისთვის და მონაცემთა კაბელის კონექტორისთვის.
კონტროლერის პანელი: დიდი ეკრანის LCD დისპლეი, ენის ჩვენების მეთოდი შეიძლება ეფუძნებოდეს მომხმარებლის საჭიროებებს, მარტივ და მკაფიო მუშაობას და პროგრამირებას, პარამეტრის ონლაინ მოდიფიკაციით და ხარვეზის თვითდიაგნოსტიკის ფუნქციებით.
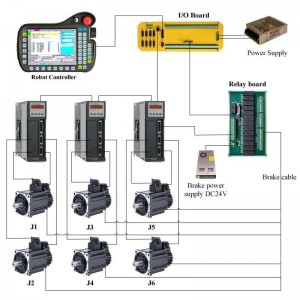
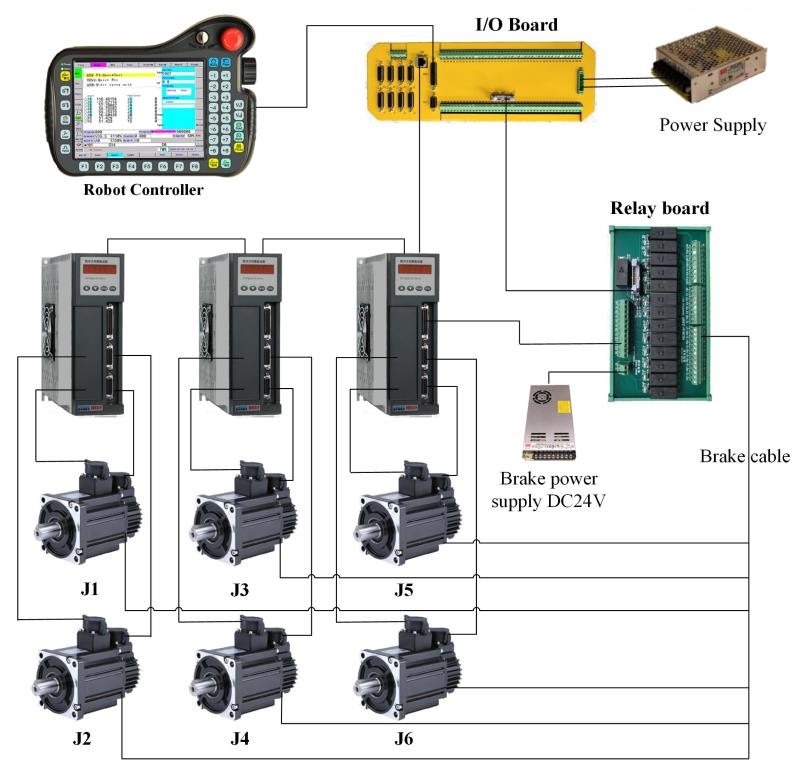
რობოტის კონტროლის კაბინეტი: მოძრაობის კონტროლის ინტელექტუალური სისტემა იყენებს სამრეწველო კომპიუტერულ ტექნოლოგიას და მთლიანად ციფრული სერვო მოდული უზრუნველყოფს მამოძრავებელ ძალას რობოტის თითოეული სახსრის AC სერვო ძრავებისთვის.
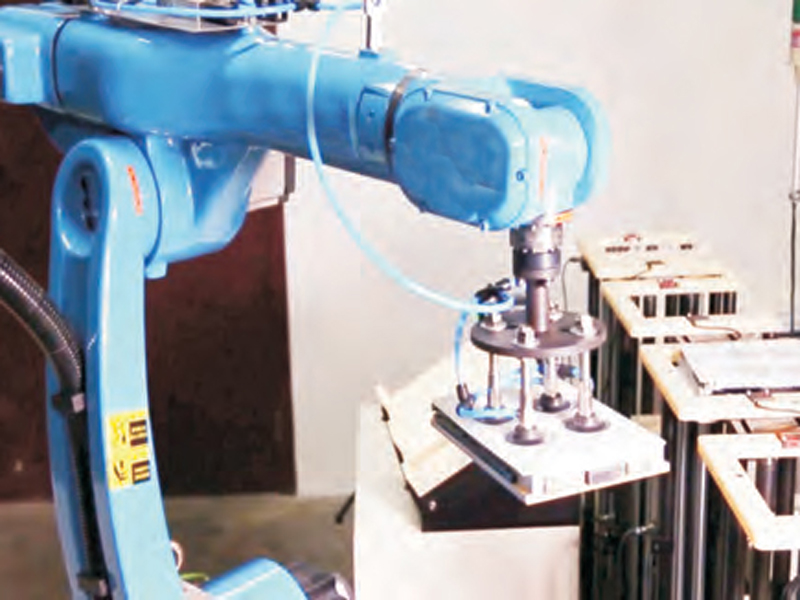
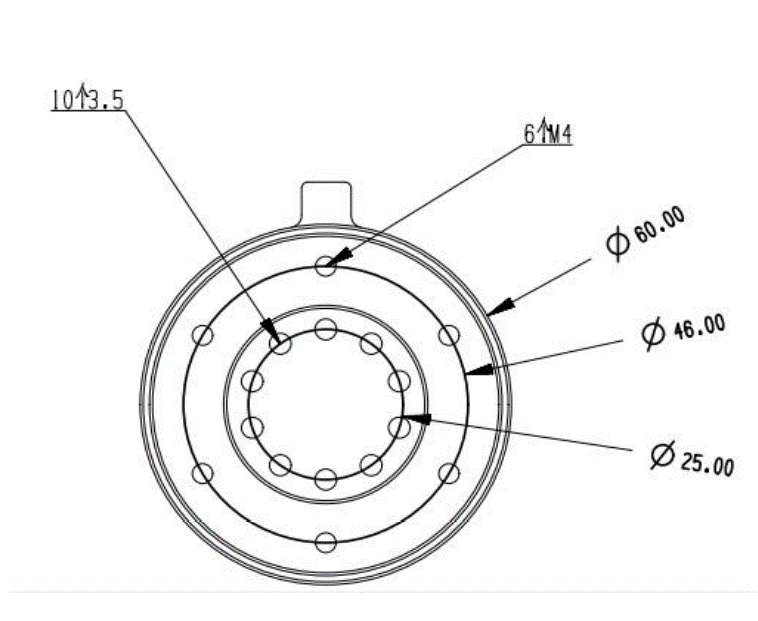
რობოტული მოწყობილობები: ხელსაწყოების მოწყობილობას შეუძლია აირჩიოს განსხვავებული სიმძიმე და რაოდენობა მორგებული მოთხოვნების შესაბამისად და ის დამონტაჟებულია ბოლო ფლანგზე, რომელიც ადვილად რეგულირდება და აქვს გამოყენების ფართო სპექტრი.